Inference in Hidden Markov Models continued: Viterbi Algorithm
This is a short post that continues from the more-detailed alpha recursion HMM post. In this post I’ll implement the Viterbi algorithm like Barber does in “Bayesian Reasoning and Machine Learning”. Like before, I’m porting the MatLab code from the textbook.
Viterbi algorithm in HMMs using message passing
The Viterbi algorithm finds the most-likely path \( h_{1:T} \) for the visibles \( v_{1:T} \), where \( T \) is the timestep of the last observed visible. The algorithm takes in the visibles \( v_{1:T} \), the initial state \( p(h_1) \), the transition probabilities \( p(h_{t} \mid h_{t - 1}) \), and the emission probabilities \( p(v_t \mid h_t) \), and returns the list of most-likely hidden states \( h_{1:T} \).
I generated the required probabilities in the alpha recursion HMM post.
Algorithm
Barber frames the Viterbi algorithm as message passing using the max-product algorithm.
This version of the algorithm begins at the end of the hidden states (\( h_T \)), and computes an incoming message from future states. The message is meant to represent the effect of maximizing over those states. Barber gives the messages as:
Once the messages are computed, the algorithm then computes the most-likely state for \( h_1 \), and uses that to compute the most-likely state for \( h_2 \) and so on. It basically maximizes the marginal of \( p(h_t \mid v_{1:T}) \) and then uses the most-likely state for \( h_t \) in the transition matrix for computing \( p(h_{t + 1} \mid v_{1:T}) \) so it returns a valid path.
Now in Python!
def viterbi(visibles, p_hidden_start, p_transition, p_emission):
num_timestamps = visibles.shape[0]
num_hidden_states = p_transition.shape[0]
# messages[t] corresponds to mu(h_t), which is the message coming into h_t
messages = np.zeros((num_timestamps, num_hidden_states))
most_likely_states = np.zeros((num_timestamps,), dtype=int)
# The message coming into the last node is 1 for all states
messages[-1] = np.ones(num_hidden_states)
# normalize!
messages[-1] /= np.sum(messages[-1])
# Compute the messages!
for t in range(num_timestamps - 1, 0, -1):
# use the data at time t to make mu[h_{t - 1}]
# compute max p(v|h)p(h|h)mu(h)!
# compute p(v|h)mu(h)
message_and_emission = messages[t] * p_emission[visibles[t]]
# compute p(v|h)p(h|h)mu(h)
# message_and_emission.reshape(-1, 1): new_state x 1
# np.tile(...): new_state x old_state
# p_transition: new_state x old_state
# np.tile(...) * p_transition: new_state x old_state
all_h_ts = np.tile(
message_and_emission.reshape(-1, 1),
(1, num_hidden_states)
) * p_transition
# the message is the value from the highest h_t
messages[t - 1] = np.max(all_h_ts, axis=0)
# and normalize
messages[t - 1] /= np.sum(messages[t - 1])
# now from the beginning! compute h_t* using these messages
# argmax will give us the state.
# argmax p(v_1|h_1)p(h_1)mu(h_1)
most_likely_states[0] = np.argmax(
p_hidden_start
* p_emission[visibles[0]]
* messages[0]
)
for t in range(1, num_timestamps):
# argmax_h_t p(v_t|h_t)p(h_t|h_{t - 1})mu(h_t)
most_likely_states[t] = np.argmax(
p_emission[visibles[t], :]
* p_transition[:, most_likely_states[t - 1]]
* messages[t]
)
return most_likely_states
most_likely_states = viterbi(
prev_post.visibles,
prev_post.p_hidden_start,
prev_post.p_transition,
prev_post.p_emission,
)
print(most_likely_states)Visualizing
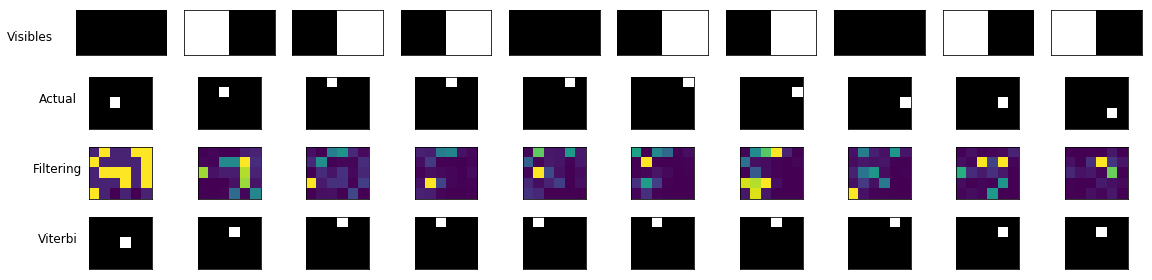
I can plot the most-likely states.
See Also
- This post builds on this post to show the Viterbi algorithm.
- The more-detailed alpha recursion HMM post.
- This notebook runs this code using the same example from Barber.